Lecture 6
Object-oriented Programming
Subclasses and inheritance II
MCS 275 Spring 2024
Emily Dumas
Lecture 6: Subclasses and inheritance II
Reminders and announcements:
- Homework 2 is due Tuesday at Noon.
- Project 1 will focus on object-oriented programming (OOP). Will be posted late this week or early next.
Plan
Finish our robot simulation class hierarchy
Discuss more OOP theory & practice
Planned Bot hierarchy
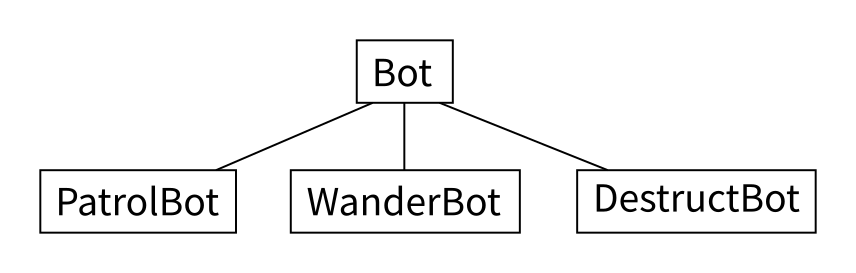
- ✅
WanderBotwalks about randomly. - ✅
DestructBotsits for a while and deactivates. - 🟨
PatrolBotwalks back and forth.
Updated Simulation
Now there are two simulation programs:
botsimulation.py- Active bots shown as*botsimulation_fancy.py- Bots have their own symbols, inactive ones are shown as ☠.
Class vs instance
Classes: Cat, Dog, Vector2, WanderBot
Instances of Cat:


Instances of Vector2:
Instance attributes
self.* assignments in constructor like
class Cat(Pet):
def __init__(self, age, fur_color):
# other stuff...
self.age = age # applies to *this* cat
self.fur_color = fur_color # applies to *this* cat
add attributes to the instance. They are therefore called instance attributes.
Often initialized from __init__ arguments and modified by methods.
Class attributes
Attributes can also be declared in the class definition, outside of any method. Then they are shared by every instance and are called class attributes. E.g.
class Cat(Pet):
retractable_claws = True # Applies to all cats
Typically used for constants (never changed).
Bot class attributes
Natural to use class attributes for:
- Vectors
WanderBotselects its step from - Preferred symbol to represent the robot in a simulation.
PatrolBot
Takes direction (vector) and n (int). Walks n steps of size
direction, then n steps of size -direction. Repeats
indefinitely.
This robot has internal state:
- Whether walking out or coming back
- How many steps it has taken in the current direction
Finite State Machine
Keep track of which state we're in. Handle input differently depending on the state. Fixed set of possible states.
if state == "work":
handle_at_work(sms_content)
elif state == "home":
handle_at_home(sms_content)
Handlers may change state depending on the input.
def handle_at_home(sms_content):
if announces_critical_outage(sms_content):
send_reply("on my way")
state = "work"
else:
# deal with it tomorrow
return
Four pillars of OOP
- Encapsulation - Objects manage their own private, internal state.
- Abstraction - Method calls express intent (independent of implementation).
- Inheritance - Distinct classes can share behavior.
- Polymorphism - Code using a class will also work on its subclasses.
Extending the simulation
Beyond adding more robot types, how might me improve or extend the simulation?
Extending the simulation
Might create a class Arena that manages the list of bots and the space in which they
move. Would have a single .update() method that updates all bots.
Arena object would be made first, then passed to each robots constructor.
Robots would call Arena methods to interrogate surroundings (e.g. avoid collision, seek
other
bots, ...)
References
- I discussed inheritance in MCS 260 Fall 2021 Lecture 27
- See Lutz, Chapter 31 for more discussion of inheritance.
- Lutz, Chapters 26-32 discuss object-oriented programming.
Revision history
- 2023-01-27 Finalization of the 2023 lecture this was based on
- 2024-01-22 Initial publication
- 2024-01-22 Typo corrected